
#118 Rotary Encoder Methods
Finding the best method for reading a rotary encoder with aan Arduino.
Notes
I’m testing some mini rotary encoders I purchased for US$3.60/lot (Jun-2015): “10 pcs Handle Length 15MM EC12 E12 Audio Encoder 360 Degree Rotary Encoder Tripod” (aliexpress seller listing).
Incremental rotary encoders generate step pulses trains that are 90˚ out of phase. Their relative sequencing therefore indicates rotation and direction:

It should be possible to hook a rotary encoder directly to an Arduino and sample the pin A/B signals. The RotaryEncoders page in the Arduino playground provides some good background and many examples but they all pretty much use the same method - read the two pins and do a direct test to see if moving forwards or reverse. These are similar to the techniques described in 6.10. Tracking the Movement of a Dial from the Arduino Cookbook.
My first attempts were pretty unsatisfactory. At both high and low rotation speeds, I’d routinely see all the possible problems: missed steps, “extra” steps, and unexpected reversals. Basically, the experience is that if the encoder is rotated right by say 30˚ and then left by the same amount, then there’s a very high chance that an encoder counter will not return to the same value. Either my rotary encoders are not very reliable, or the programming techniques are doing a poor job of reliably capturing the input.
It doesn’t take much research to discover this is a common experience. Perhaps if I had expensive, high-precision encoders then things would “just work”, but the typical rotary encoders used for manual input do seem notoriously noisy.
So my experiment here has turned into a test of the various techniques, in search of the most suitable for general use. Read on for more details, but here’s the summary so far:
| Technique | Accuracy |
|---|---|
| RotaryISR - change-triggered interrupt using the Rotary library | Perfect. 100% accuracy at all speeds |
| RotaryPolling - poll with the Rotary library | Perfect. 100% accuracy at all speeds |
| Polling - simple polling with hardware debounce | Pretty good. the occasional extra event in the wrong direction |
| OnChangeISR - change-triggered interrupt and standard digitalRead methods | OK, direction usually correct but lots of ‘bounce’ |
| Polling - simple polling and standard digitalRead methods | Poor, direction bounces around quite a bit |
| OnChangeDirectPortAccessISR - change-triggered interrupt and direct port methods | Poor, strong left-bias |
| FallingEdgeISR - falling-edge triggered interrupt and standard digitalRead methods | Very poor, highly susceptible to bounce |
| FallingEdgeDirectPortAccessISR - falling-edge triggered interrupt and direct port methods | Extremely poor, highly susceptible to bounce |
It is pretty clear that the Rotary library is the best option by far, and delivers stunningly good results. All other options are susceptible to bouncing inputs to varying degrees. The secret to the Rotary library is that it models the state machine of the grey code produced by the rotary encoder, and only responds to valid state transitions. This effectively eliminates all the noise. See Ben Buxton’s blog post on the rotary library for more detail of how and why this works so well.
See the RotaryEncoderModule for an example of using the Rotary library with a rotary encoder module driving an 8x8 LED array.
Encoding Considerations
Here’s a quick summary of the main considerations when interfacing with a rotary encoder
Full-step, Half-step or Quarter-step?
From the timing/phase diagram it’s clear there are 4 distinct transitions per “cycle”:
| Position | A | B |
|---|---|---|
| Step1 | 0 | 0 |
| 1/4 | 1 | 0 |
| 1/2 | 1 | 1 |
| 3/4 | 0 | 1 |
| Step2 | 0 | 0 |
| … |
Different techniques lead to differing levels of resolution, for example:
- the Rotary library looks for a full cycle by default i.e. only one even per step
- a rising or falling edge interrupt will only catch one event per cycle per pin
- a change interrupt on both pins will catch all 4 transitions per step
Capturing more transitions is not much use if bounce is not effectively dealt with.
Polling or Interrupt Handler
While it is possible to read a rotary encoder with a polling approach, it is liable to become increasingly inaccurate as the program gets more complex.
Rotary encoders are prime example of where using an interrupt routine yields the best results. Most examples where attach a hardware interrupt to either or both of the encoder pins. If this is not possible, an alternative would be to use a timer interrupt to poll the encoder on a frequent and reliable basis.
Note that hardware interrupts can at first make the bounce problem worse, as they will trigger on all the bouncing transitions - transitions that might have been missed with a polling approach for example.
Hardware or Software Debouncing
The general experience is that debouncing is critical when using mini-rotary encoders.
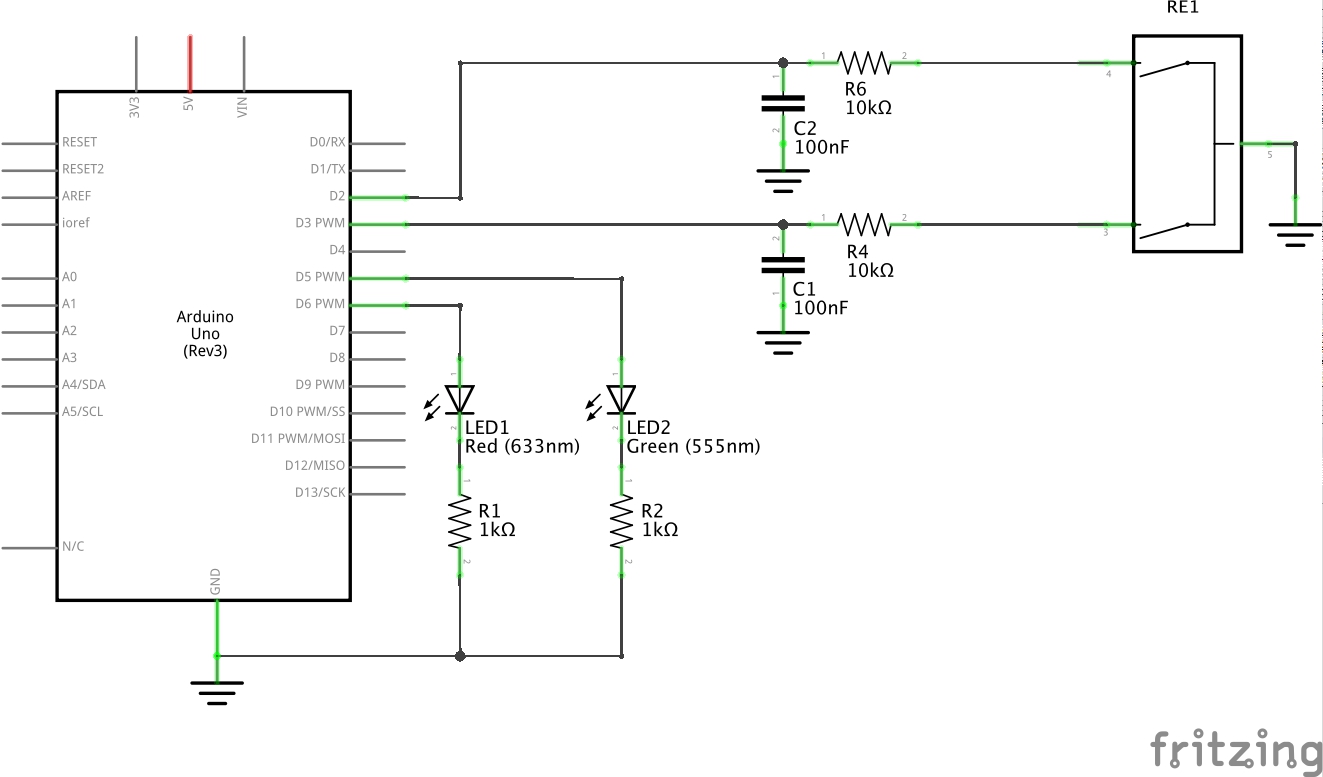
Hardware Debouncing
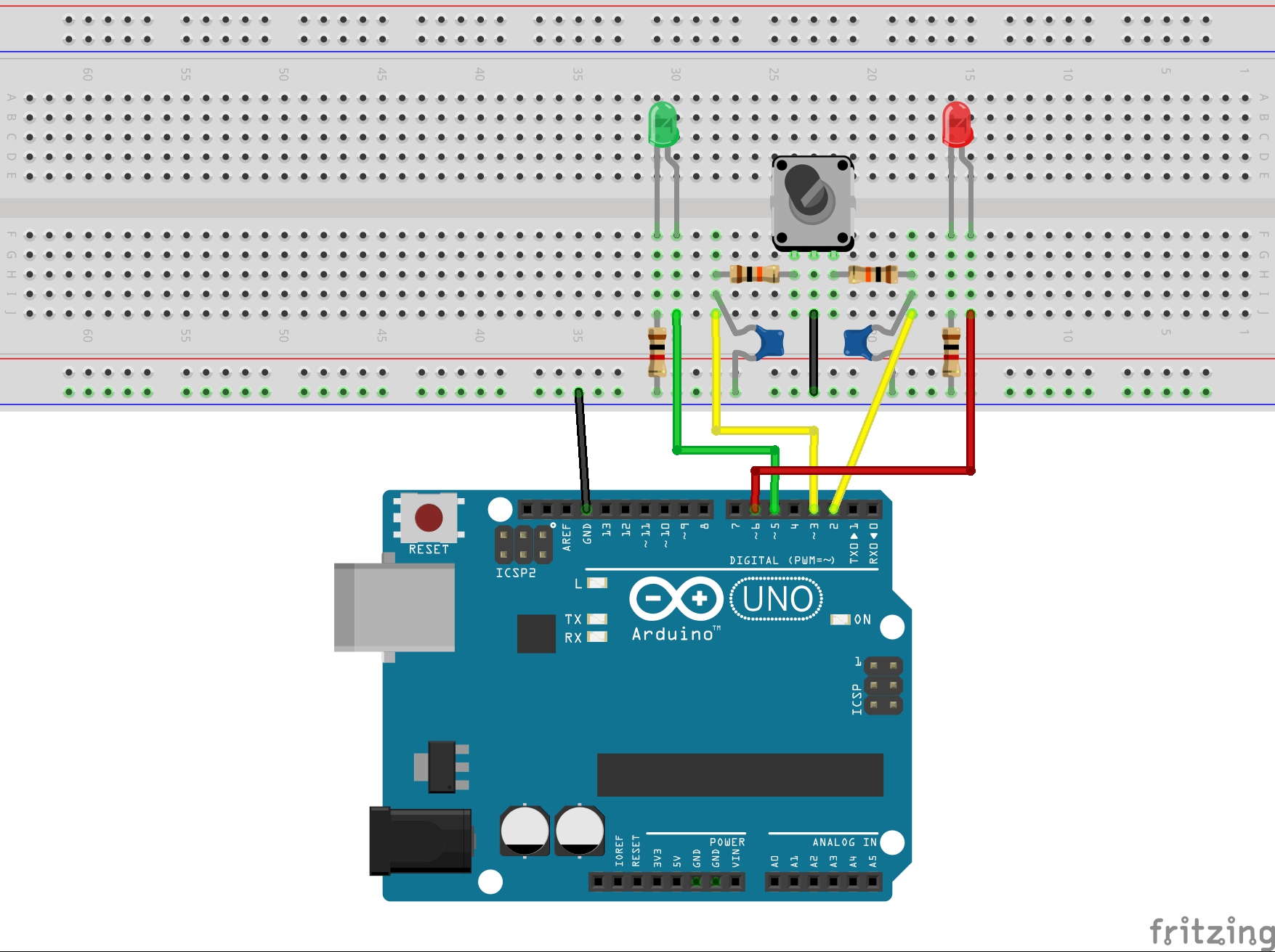
Many people have experimented with hardware debouncing. Adding hardware debouncing (see the alternative schematics below) does yield some improvement. For example a 10kΩ/100nF RC filter on the Polling sketch eliminates most of the noise. But not all - it still triggers the occasional “wrong” signal.
Software Debouncing
Software debouncing generally uses time-based techniques to discard “probably wrong” readings. For example this example on the Arduino playground sets a minimum time between accepting valid signals. Others have used the Bounce/Bounce2 library for the same purpose. I haven’t included a software debounce example here yet, mainly because just like hardware debouncing, they don’t totally solve the problem and just add size and complexity to the code.
“State Machine” Debouncing
This is the approach used by the Rotary library. It basically means building in the knowledge of the valid state transitions that apply for a rotary encoder, and only accepting input that follows a valid sequence. This effectively eliminates all the noise and bouncing. See Ben Buxton’s blog post on the rotary library for more detail of how and why this works so well.
Standard or Direct Port Access
The standard library methods for working with GPIO pins - e.g. digitalRead - are notoriously slow.
And if we use these methods to read the two rotary encoder pins, we can’t escape the fact that the two pins are never read simultaneously.
Direct port access adds complexity and some portability concerns to the code, but does both speed up port access, and also allow us to read two pins simultaneously. This is similar the the approach described by Oleg Mazurov in this article.
However, as my experiments show here, that in itself does not make for a better rotary encoder reader. In fact it makes things worse, because the program just gets better and better at detecting the noise on the input.
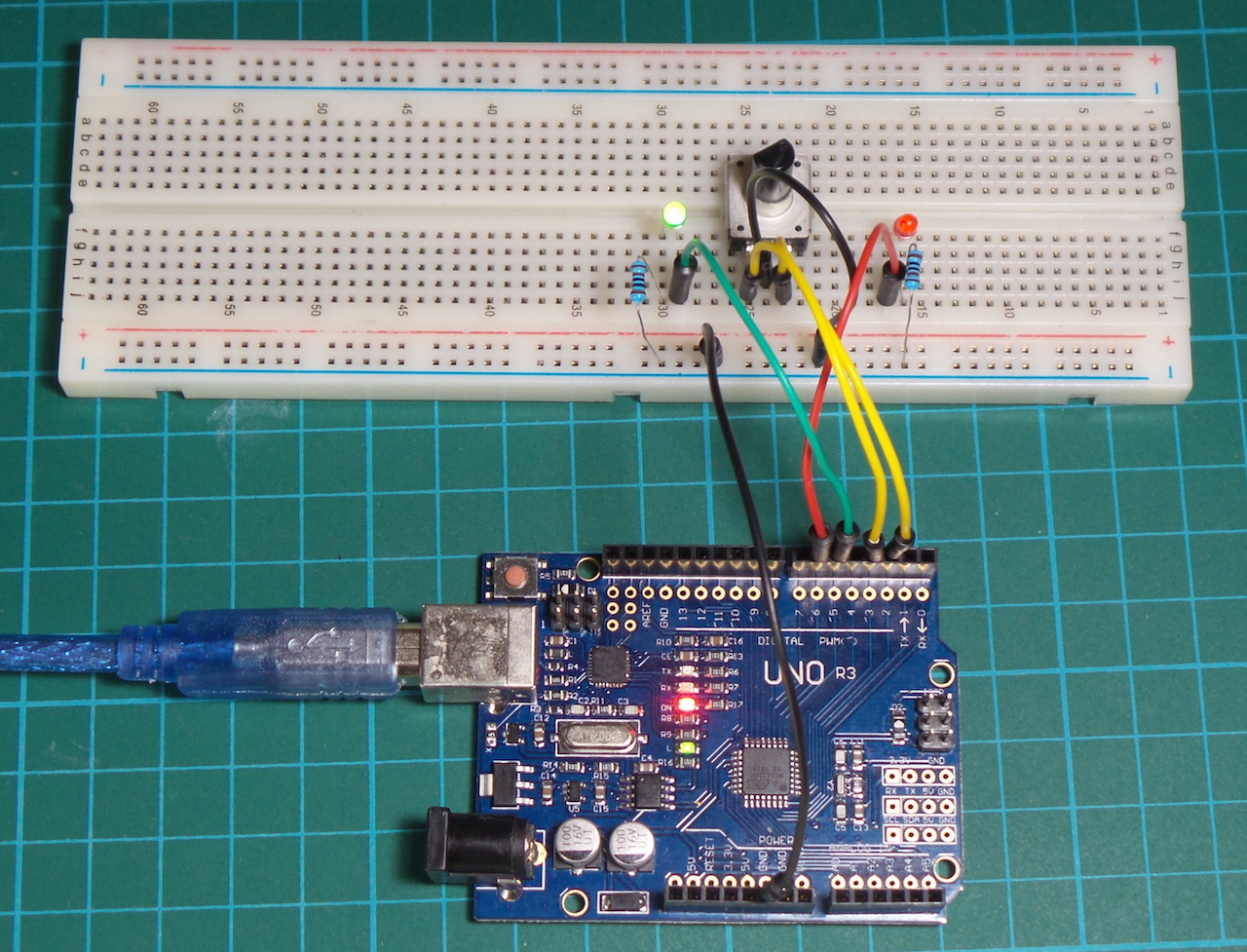
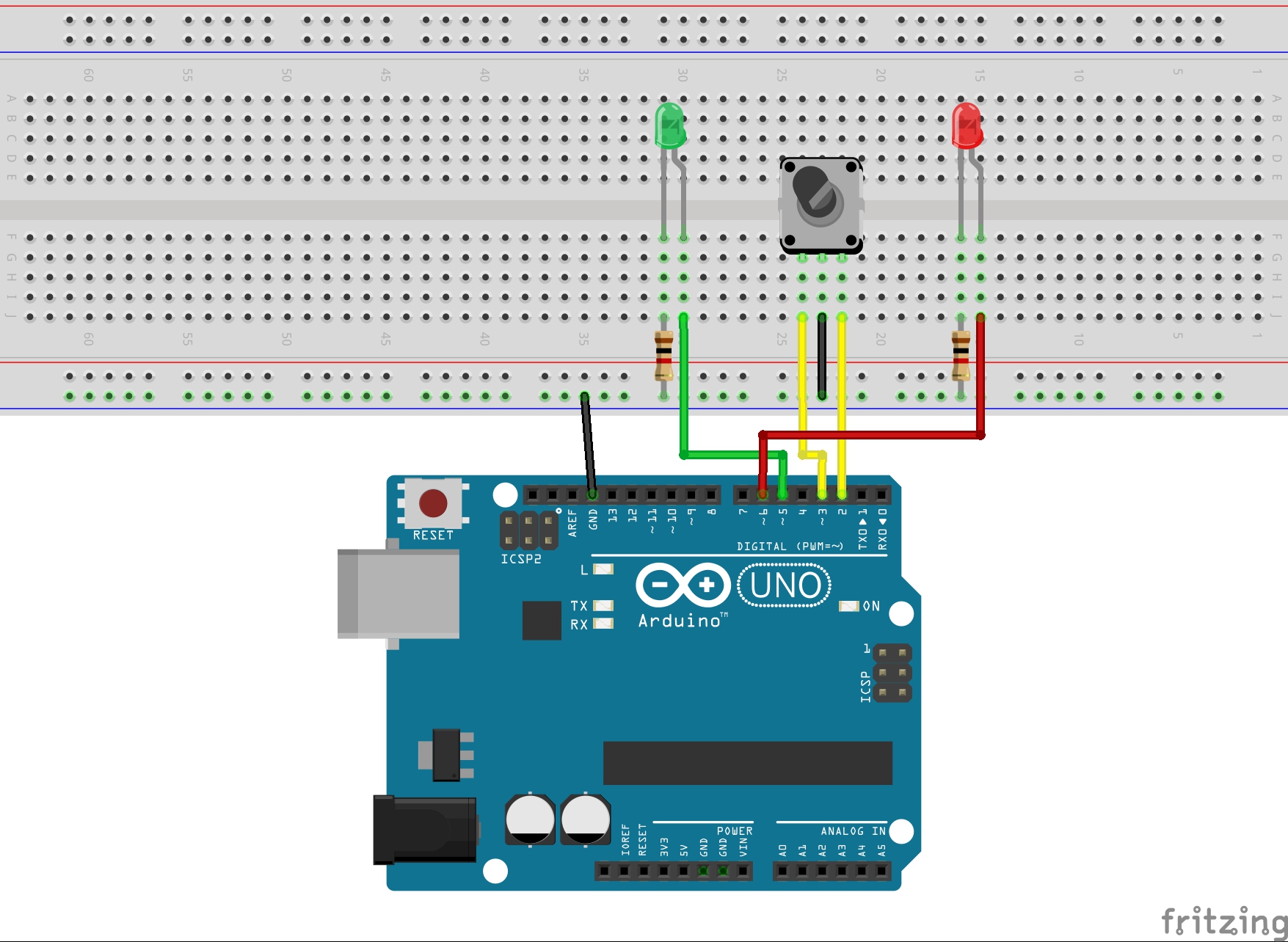
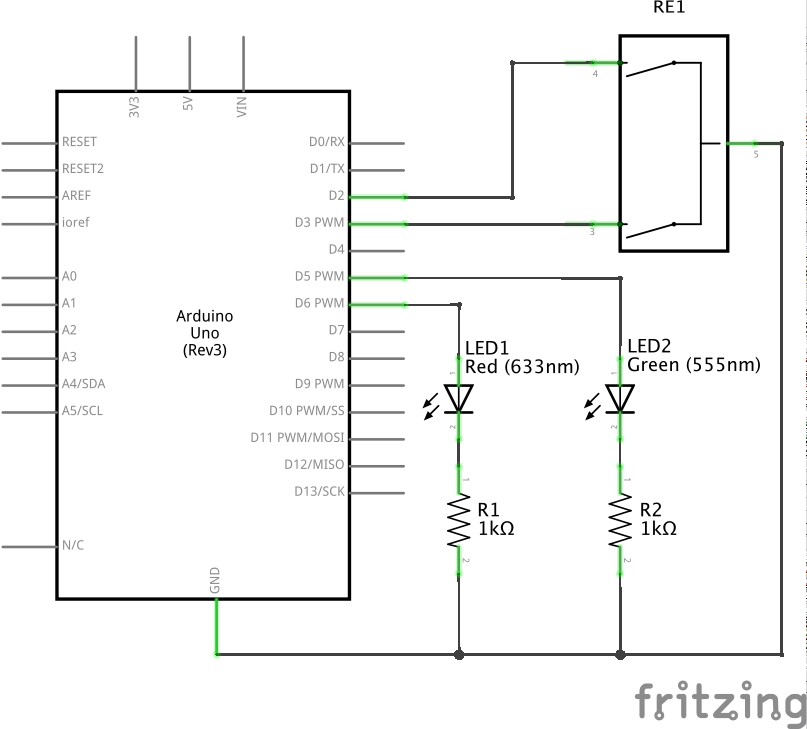
Construction
Basic Direct-Connect
With Hardware Debouncing
Credits and References
- “10 pcs Handle Length 15MM EC12 E12 Audio Encoder 360 Degree Rotary Encoder Tripod” (aliexpress seller listing)
- Purchased for US$3.60/lot (Jun-2015)
- No longer available from this seller
- RotaryEncoders - Arduino playground
- Rotary_encoder - wikipedia page
- Rotary library
- Arduino Port Registers - all the info needed for direct port manipulation
- Arduino Cookbook
- 6.10. Tracking the Movement of a Dial
- 6.12. Tracking the Movement of a Dial in a Busy Sketch
- Rotary Encoder: H/W, S/W or No Debounce? - good discussion and investigation of different debouncing schemes
- Reading rotary encoder on Arduino by Oleg Mazurov
- Rotary encoder interrupt service routine for AVR micros updated article by Oleg Mazurov
- Five things I never use in Arduino projects - including #5 External debouncing hardware for rotary encoders
- Arduino: Using a rotary encoder
- RotaryEncoderModule - a project that tests a rotary encoder module driving an 8x8 LED array