
#042 ServoTest
Test the positioning accuracy of an SG90 servo motor driven by an Arduino
Notes
I’m testing the control of a TowerPro SG90 9g Micro Servo. According the the datasheet, this has a 180 degree sweep.
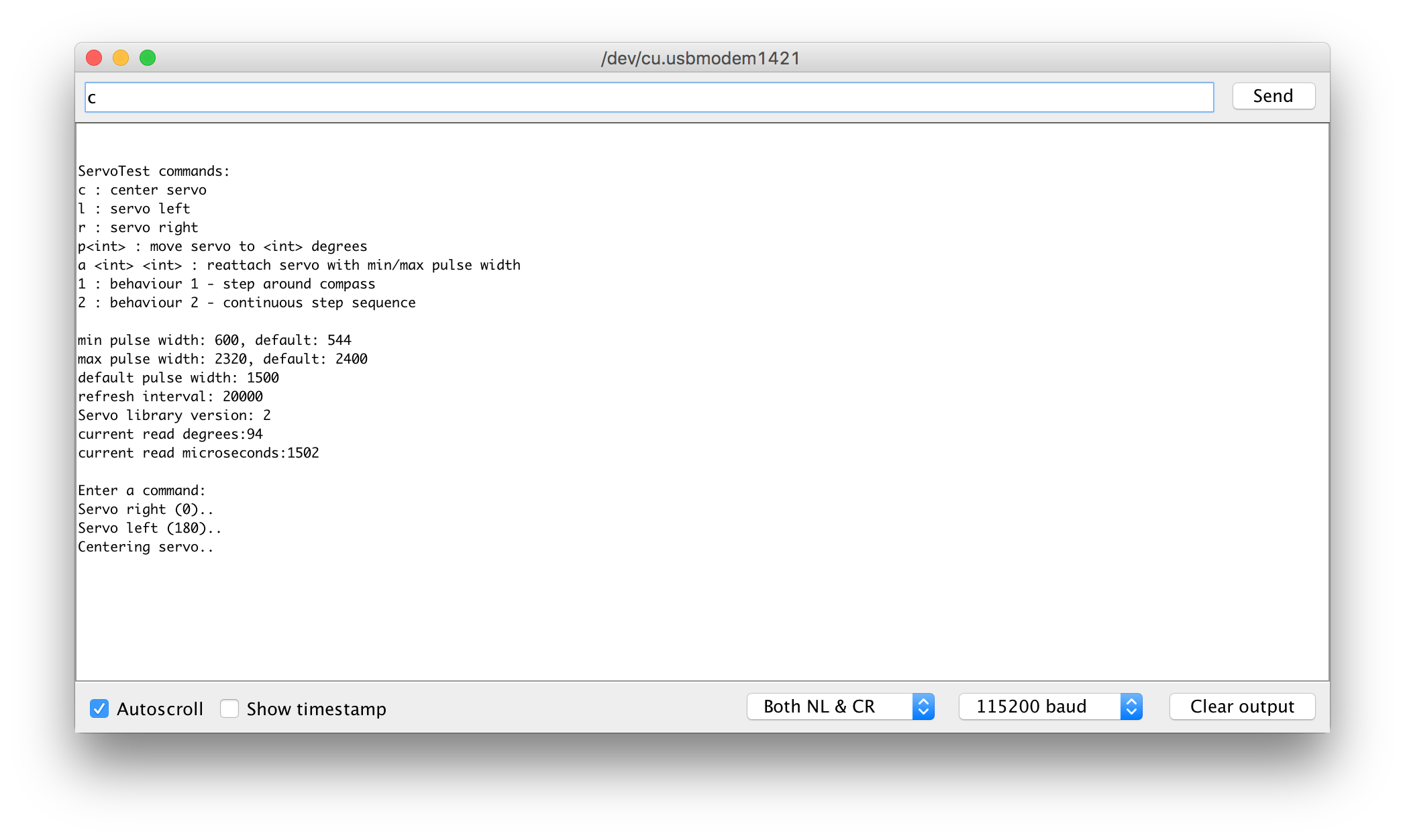
ServoTest accepts a range of commands over the serial interface to perform various servo positioning tasks. See the splash screen when you open the console window for options.
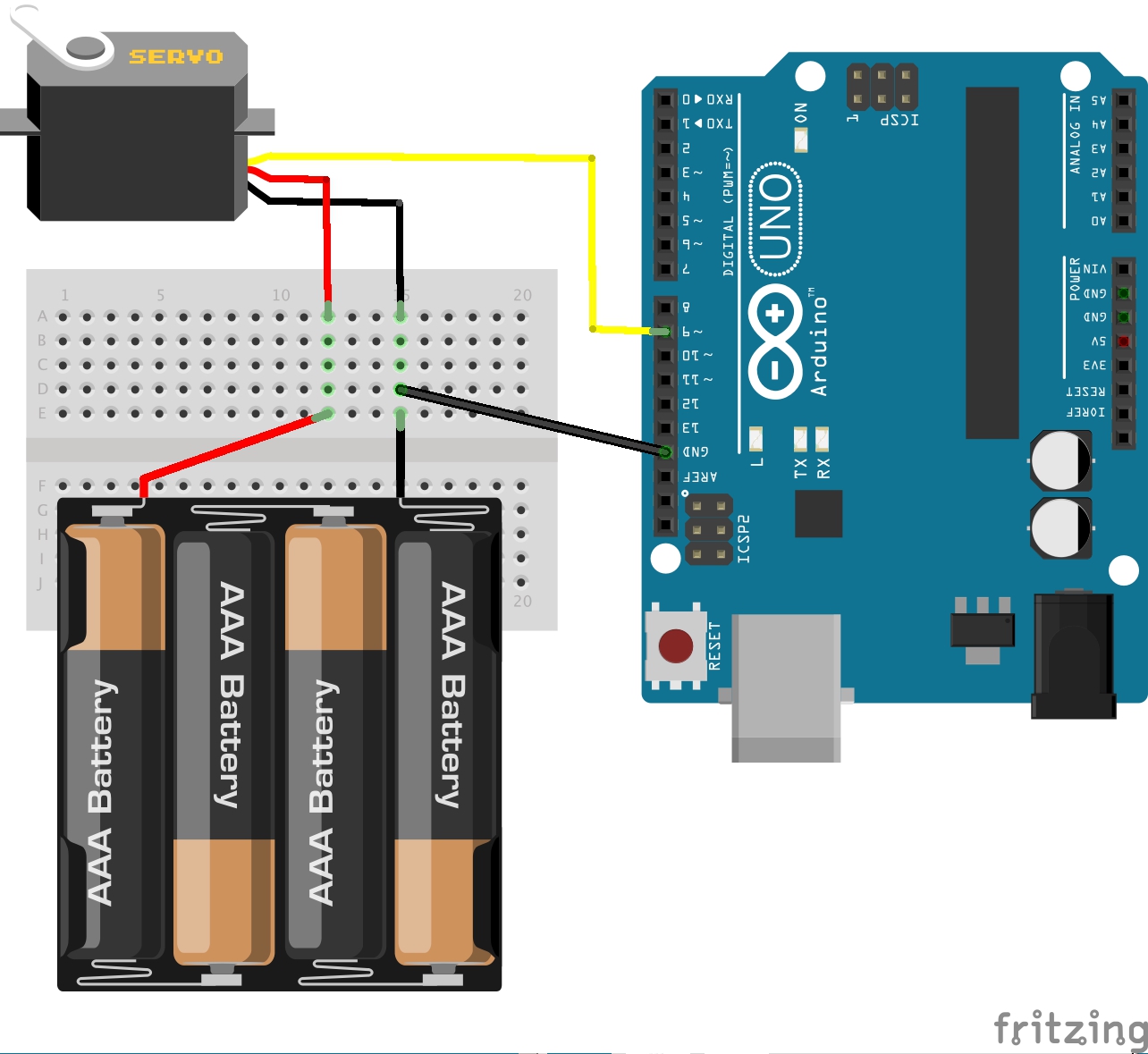
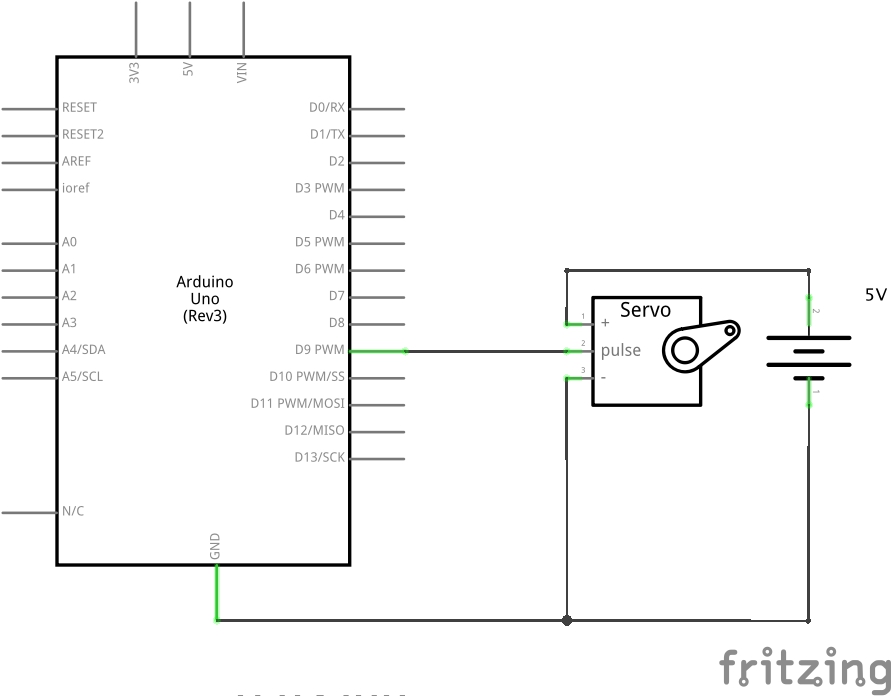
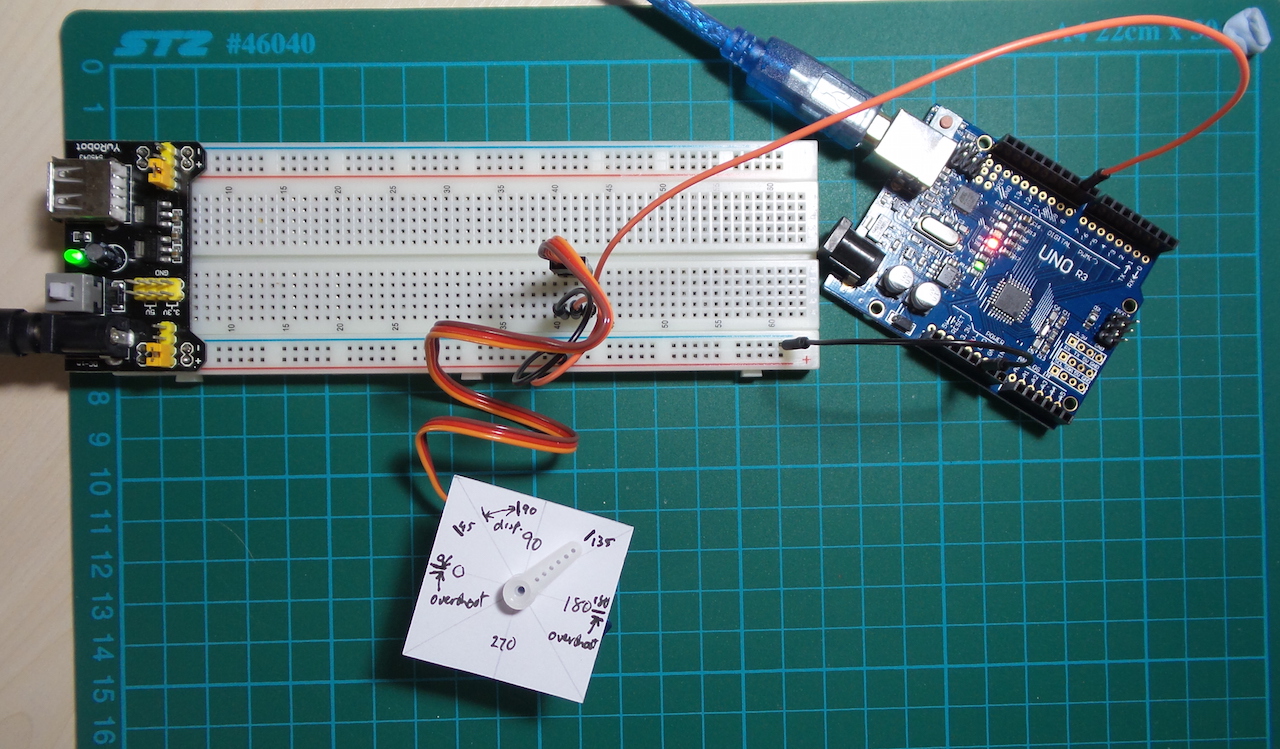
Cable connections
The three cable connections to the servo are identified as follows:
| Connection | Wire |
|---|---|
| PWM | orange |
| Vcc | red |
| Ground | brown |
Powering the Servo
The servo operates at 4.8V/5V. While you can tap power directly from 5V Arduino pin, this is not really recommended (especially if more than one servo connected) as the current requirements can overwhelm the Arduino.
Performance
First up, the servo is pretty zippy.
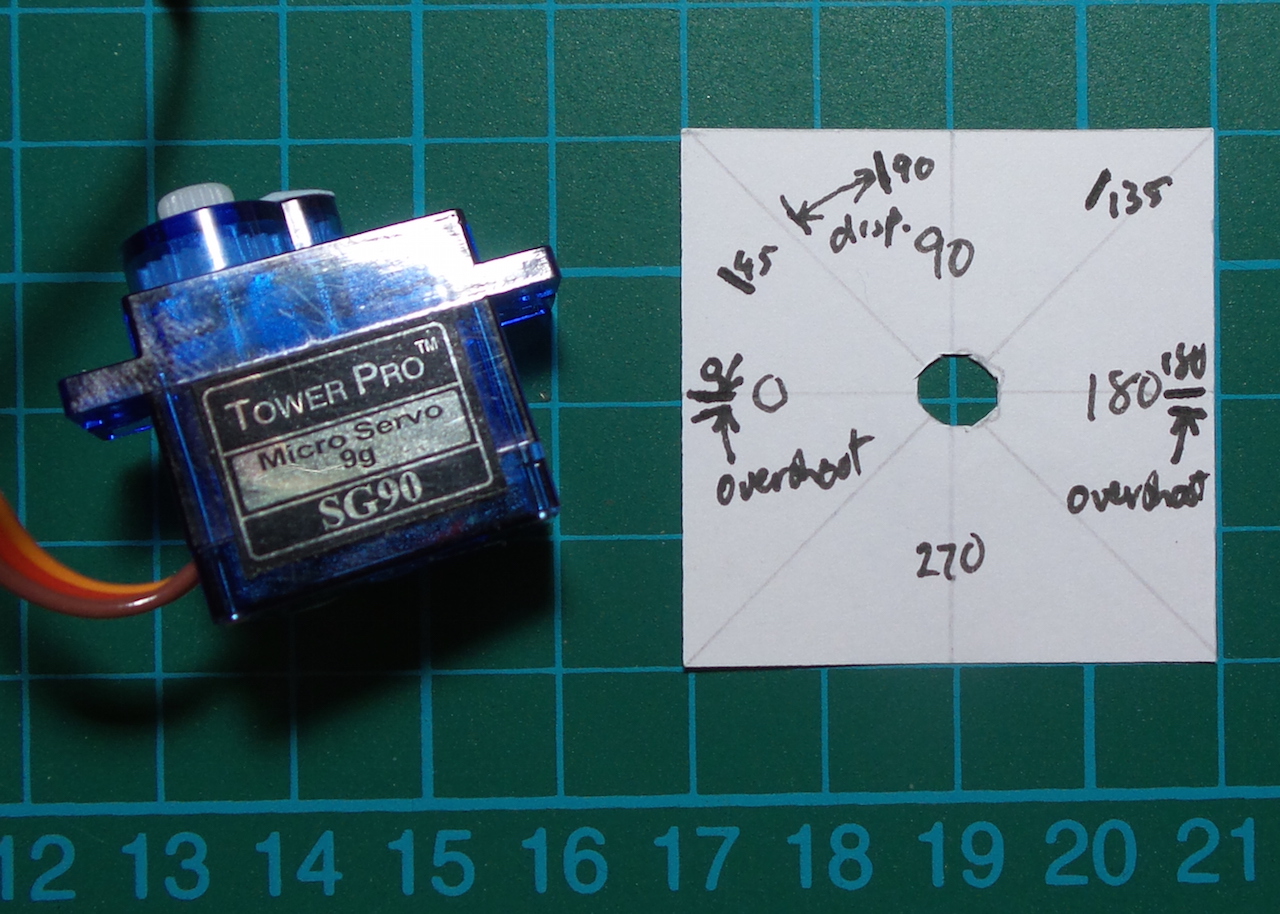
But as can be seen in the chart below, the default positioning using the Servo library with this specific servo is a bit off. Specifically:
- The full sweep is accurate - very close to 180 degrees.
- When positioning at 0 or 180, it overshoots by 5 degrees or so before rebounding to the correct position. It doesn’t have this behaviour for intermediate settings. Curious.
- The step positioning between 0 and 180 under by about 15 degrees e.g. the request top position at 45 degrees results in an actual position of about 30 degrees.
- I tried a few different SG90 units, and the all exhibit similar but not exactly identical behaviour.
Here is my little positioning chart:
I suspect the positioning accuracy may be largely fixed by tuning the Servo pulse width settings. TODO: that’s an investigation for another day..
Performance - Refined
So I came back to the issue of accuracy, with some interesting findings:
- for the particular servo in hand, the min/max pulse widths needed some modification. Using
myservo.attach(SERVO_PIN,600,2320);gives a much high degree of accuracy fo 0-180 degree sweep than with the default settings (544/2400). - the servo appear quite sensitive to power. If a battery is running out of juice, will start to get trembling in the positioning.
Construction
Credits and References
- TowerPro SG90 datasheet - 9g Micro Servo
- Servo library reference
- Based on the Arduino Sweep example
- Arduino Cookbook - 8.1 Controlling the Position of a Servo