
#194 ESP8266 DIY Devboard
a DIY devboard for an ESP-01 ESP8266
Notes
With the funding of the MicroPython on the ESP8266 campaign, my interest in the ESP8266 is rekindled.
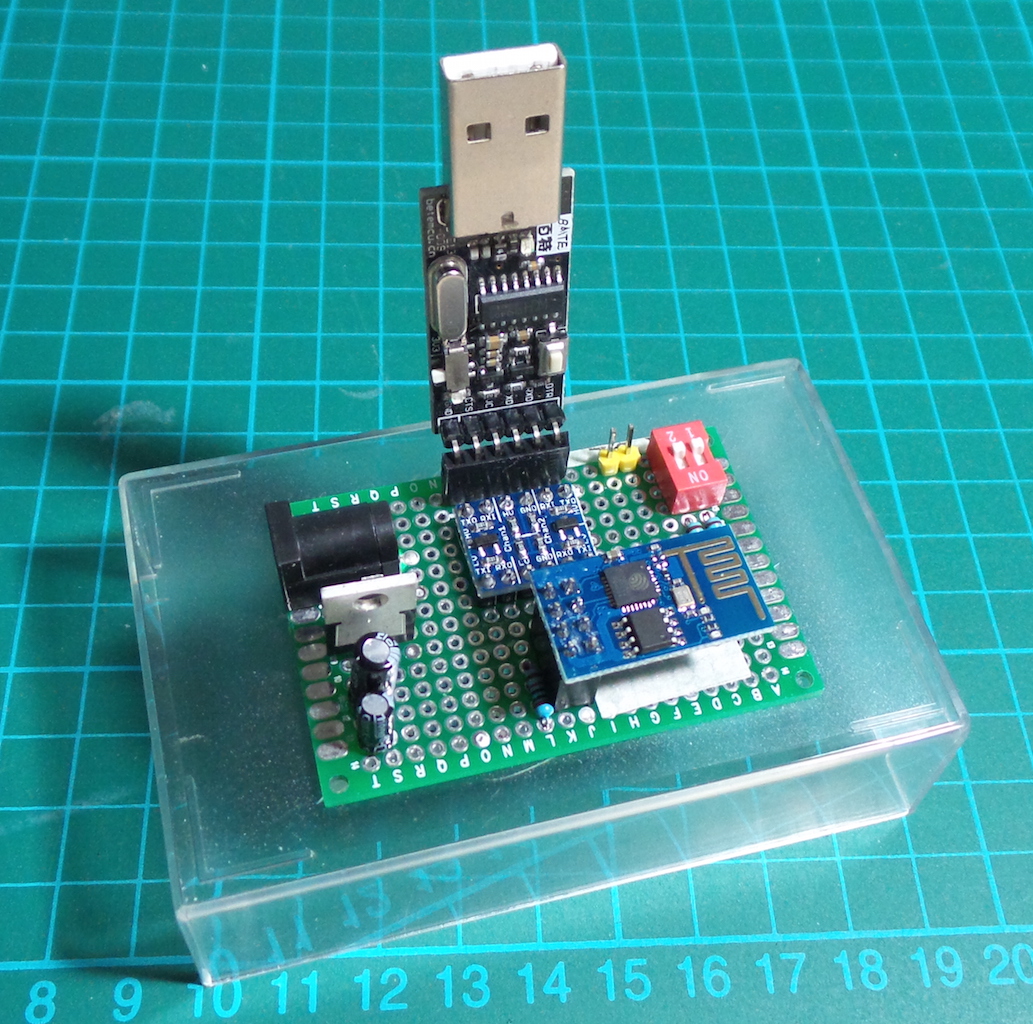
I have an ESP-01 module that I’d played around with before, but I was a bit tired of wiring it up a breadboard again. So here are my notes on a little “devboard” I whipped up on a 4x6cm protoboard and hot-glued to a business card holder.
Now it’s plug’n’play - add power and plug in my CH340G USB adapter and I’m good to go.
Features
This is what I’ve included on the board:
- LD1117 3.3V regulator circuit (power from a barrel jack)
- BidirectionalLevelShifterModule to convert 5V serial signals to 3.3V
- fixed pull-up on the CH_PD chip enable
- pull-up resistors on GPIO_0 and RESET, with pull-down toggle switches
- breakout pins for GND and GPIO2
- 2x4 socket for the ESP8266
Switch Controls
There are two switches on the board (I used a DIP switch module). These are for controlling the reset and GPIO_0 lines. The normal position is “off”.
| Switch | Pin | Off | On | Usage |
|---|---|---|---|---|
| SW1 (left) | GPIO_0 | Pulled high | Pulled low | Pull low to enter flash mode |
| SW2 (right) | RESET | Pulled high | Pulled low | Toggle low then high to reset the board |
Test Drive with espy.rb
To verify everything was working OK on the devboard, I plugged in the ESP8266 with default firmware and I exercised it with SerialTest/ruby. Here’s a test of getting the time:
$ bundle exec ./espy.rb /dev/tty.wchusbserial2420 get http://192.168.10.87/time/now.txt
ESP8266 Client initialised for : /dev/tty.wchusbserial2420
connection options : {"baud"=>115200, "data_bits"=>8, "stop_bits"=>1, "parity"=>0}
signals : {"rts"=>1, "dtr"=>1, "cts"=>0, "dsr"=>0, "dcd"=>0, "ri"=>0}
Waiting to warm up the connection..
AT+CIPSTART="TCP","192.168.10.87",80
CONNECT
OK
AT+CIPSEND=96
OK
>
Recv 96 bytes
SEND OK
+IPD,170:HTTP/1.1 200 OK
Content-Type: text/plain;charset=utf-8
Content-Length: 20
X-Content-Type-Options: nosniff
Connection: keep-alive
Server: thin
2025-06-13T06:59:29Z
AT+CIPCLOSE
CLOSED
OK
Test Drive with the esptool
esptool.py requires the board to be in flash mode:
- SW1 “on” to pull-down GPIO_0 (flash mode)
- SW2 toggled on then off (reset the board)
Then the basic esptool.py commands to interrogate the board work fine:
$ esptool.py --port /dev/tty.wchusbserial14540 chip_id
Connecting...
Chip ID: 0x009ccdd2
$ esptool.py --port /dev/tty.wchusbserial14540 flash_id
Connecting...
Manufacturer: c8
Device: 4013
$ esptool.py --port /dev/tty.wchusbserial14540 read_mac
Connecting...
MAC: 18:fe:34:9c:cd:d2
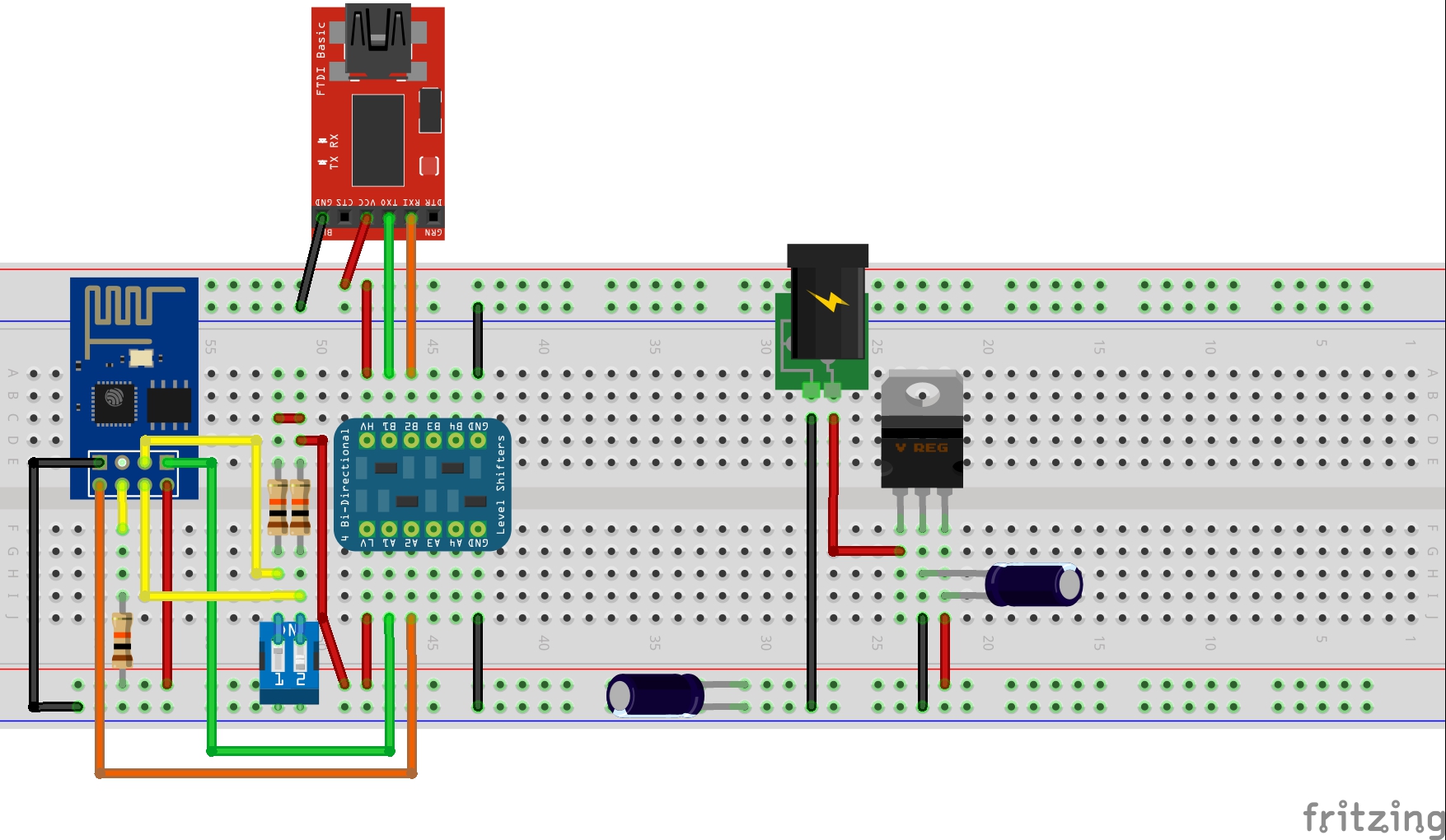
Construction
Here’s the equivalent breadboard circuit:
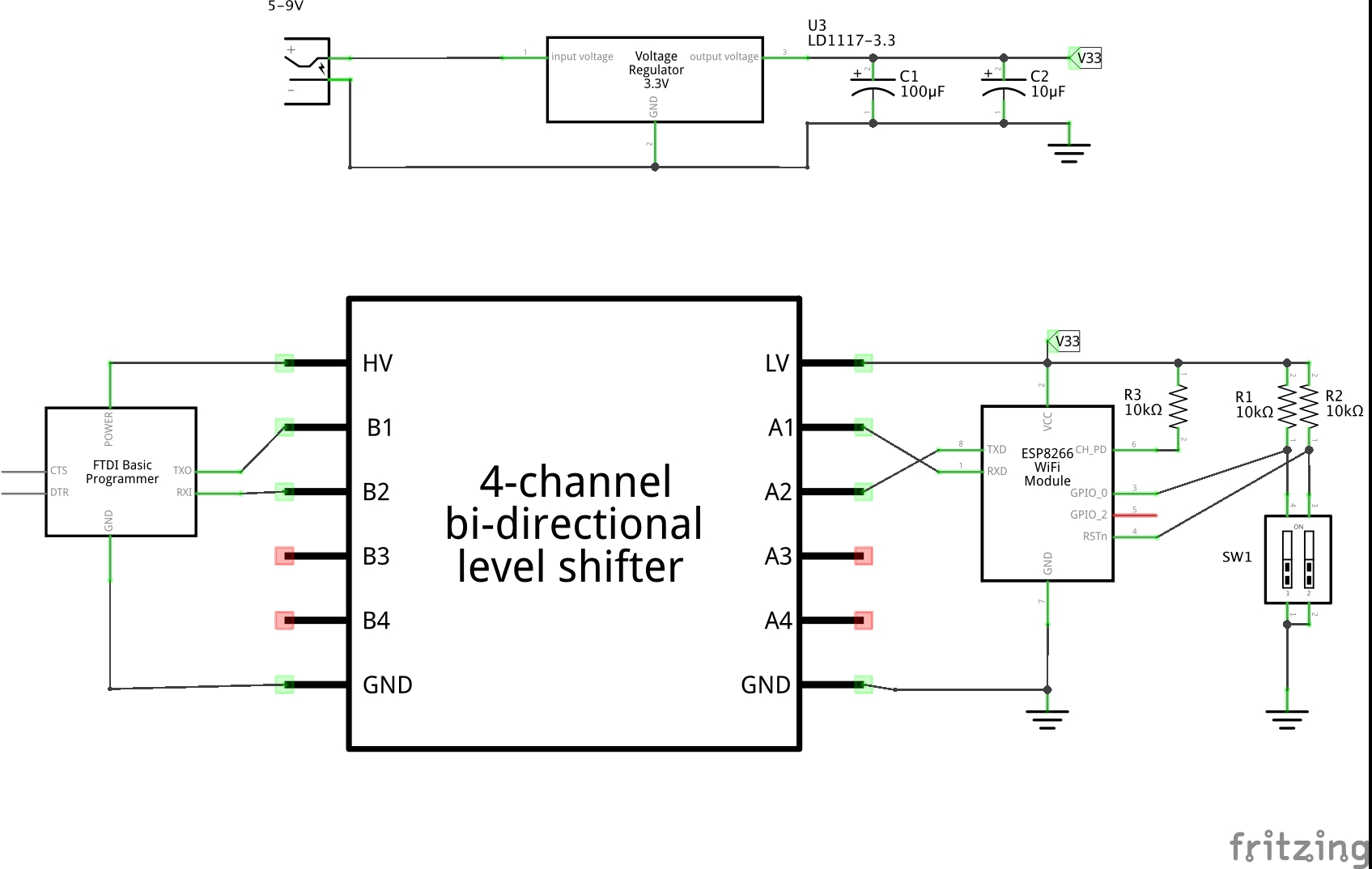
And schematic:
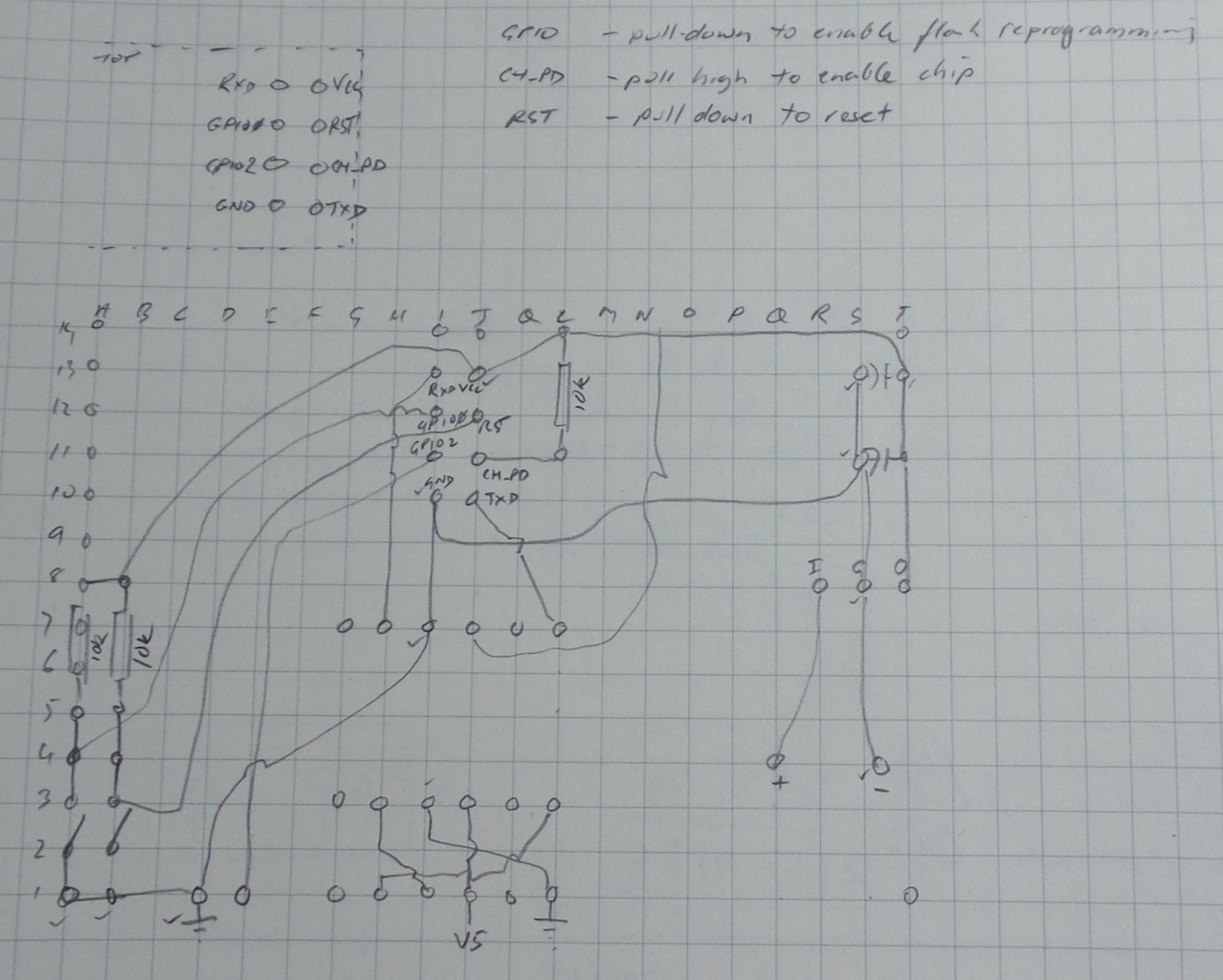
My rough 4x6cm protoboard layout:
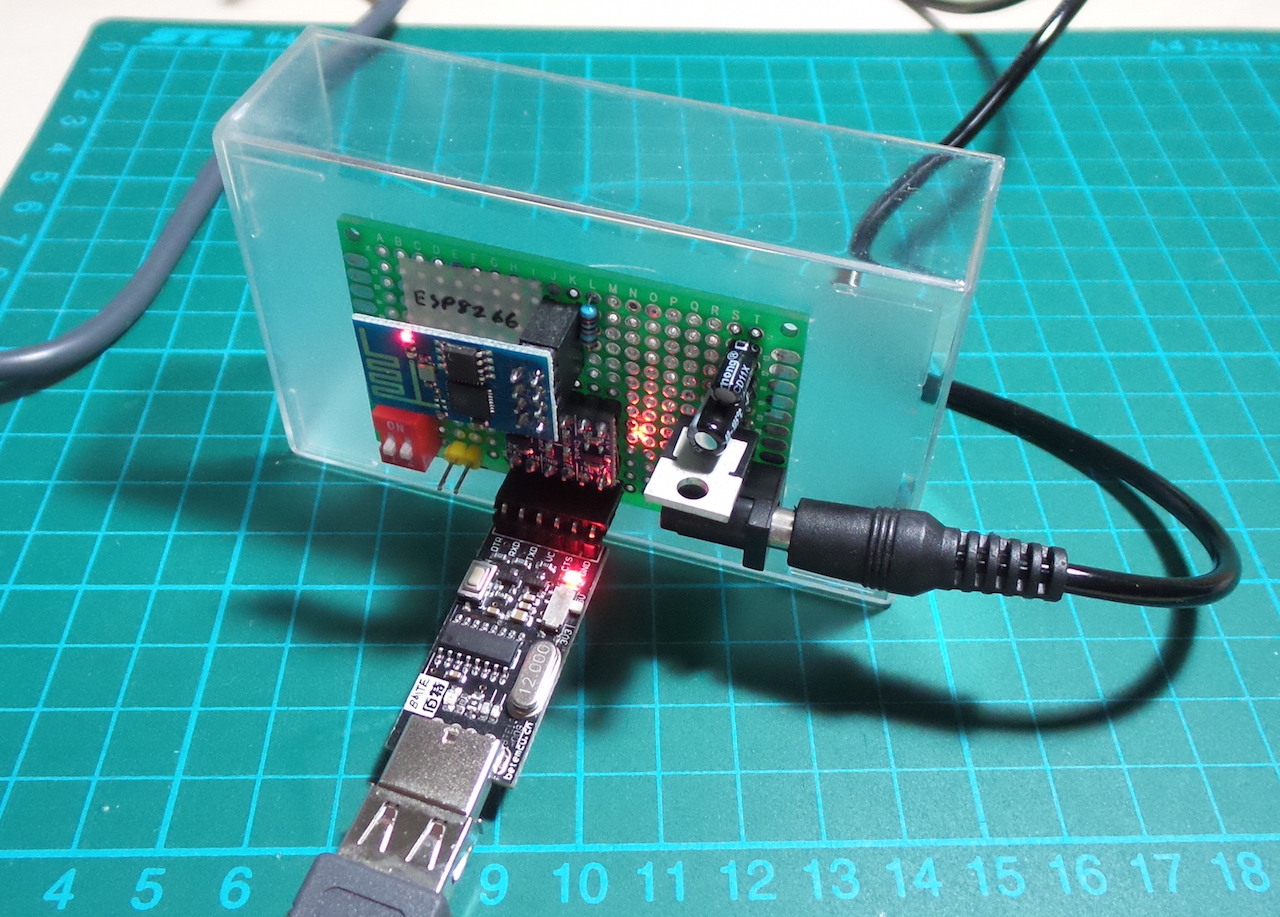
The end result:
Credits and References
- esptool.py
- LEAP#134 BidirectionalLevelShifterModule
- LEAP#154 SerialTest - my first test of the ESP8266, with more details of board use
- LEAP#152 LD1117 Regulator - LD1117 circuit and notes
- ..as mentioned on my blog