
#293 CD4060 RC Oscillator
Exploring the behaviour of the CD4060 ripple counter driven by an RC oscillator.
Notes
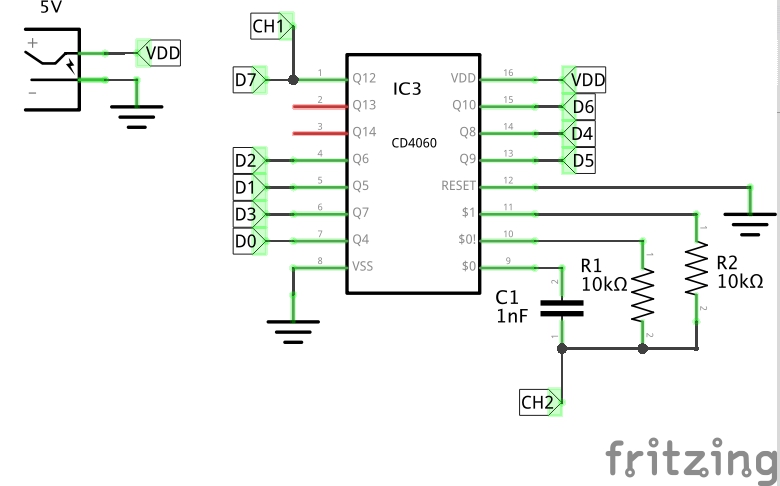
The CD4060 datasheet describes an RC oscillator configuration for self-driving the ripple counter. A 50% duty cycle is achieved when R1 = R2.

In this test I’m using R1 = R2 = 10kΩ, and C1 = 1nF. During charge/discharge, the equivalent resistance is 10kΩ|10kΩ i.e. 5kΩ, so the time constant for the rising and falling phases is 5µs (200kHz).
Thus for a near complete charge/discharge of 5 time constants, we’d expect an oscillation of around 40kHz. In practice, I’m measuring 38.7kHz .. so the approximation appears to be pretty close.
Here’s a trace of the oscillator (tapped at the net marked CH2 in the schematic):
The reset pin 12 should be pulled low to ensure stable operation. If left floating it can cause spurious results such as picking up 50/60Hz oscillation.
Ripple Counter
The CD4060 is a 14 stage ripple counter constructed of RS flip-flop units - see the functional diagram from the datasheet:
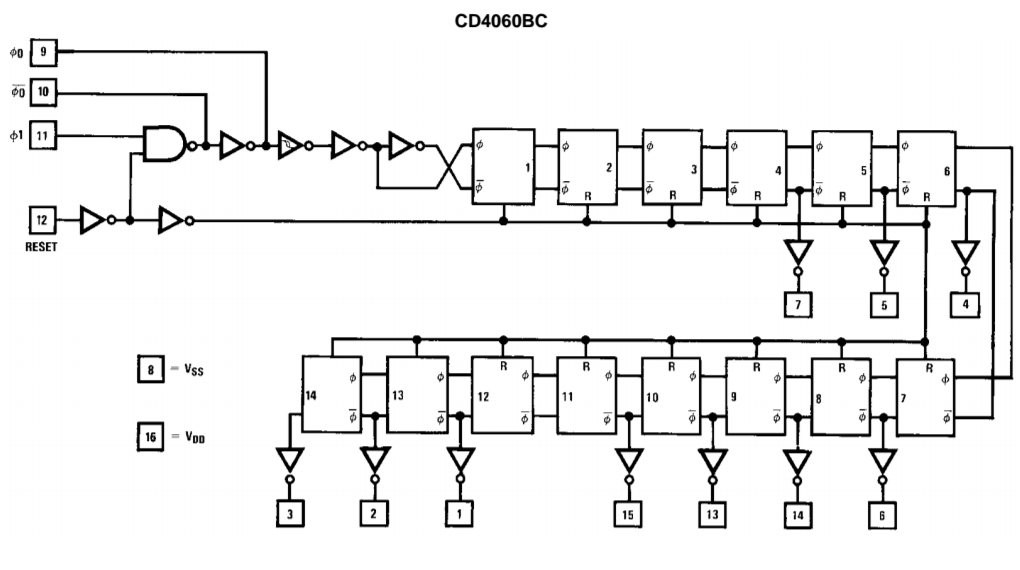
The input signal passes 4 stages before the first output is tapped (Q4). Thus the first (Q4) output signal divides the input frequency by a factor of 2^4
Stage 11 (Q11) of the ripple counter is also not exposed on a pin.
The lack of Q0-3 and Q11 is I think just pin economics so it all fits it in a DIP16 package.
The performance is summarised in the table and scope capture below.
| Signal | Scope | Frequency (theory) | Frequency (actual) | Note |
|---|---|---|---|---|
| CH1 | CH1 | 9.765Hz | 10Hz | = D7 |
| CH2 | CH2 | 40kHz | 38.7kHz | f-input |
| Q4 | D0 | 2.5kHz | 2.5kHz | f-input/2^4 |
| Q5 | D1 | 1.25kHz | 1.25KHz | f-input/2^5 |
| Q6 | D2 | 625Hz | 623Hz | f-input/2^6 |
| Q7 | D3 | 312.5Hz | 312Hz | f-input/2^7 |
| Q8 | D4 | 156.25Hz | 155Hz | f-input/2^8 |
| Q9 | D5 | 78.125Hz | 78Hz | f-input/2^9 |
| Q10 | D6 | 39.06Hz | 39Hz | f-input/2^10 |
| Q12 | D7 | 9.765Hz | 10Hz | f-input/2^12 |
| Q13 | 4.883Hz | 5Hz | f-input/2^13 | |
| Q14 | 2.441Hz | 2Hz | f-input/2^14 |
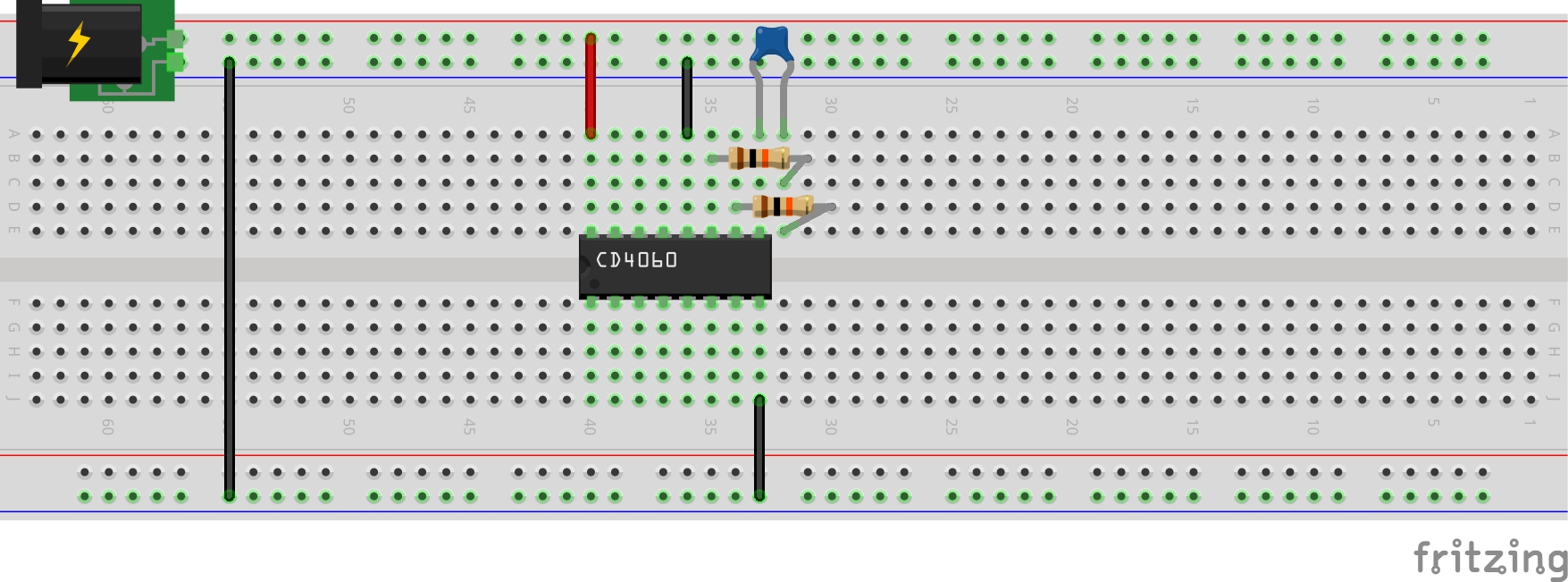
Construction
Credits and References
- CD4060 datasheet
- https://www.build-electronic-circuits.com/4000-series-integrated-circuits/ic-4060/
- Flip-flops - wikipedia
- LEAP#294 CD4060/CrystalOscillator - similar circuit but crystal-controlled
- ..as mentioned on my blog