
#601 Low Power Mini Servos
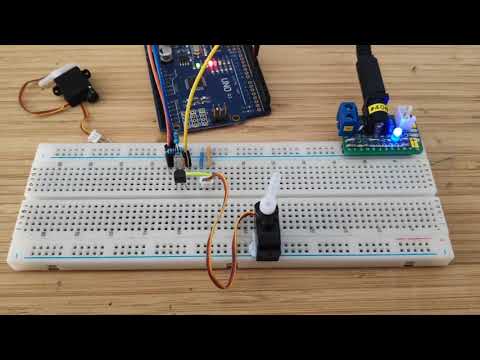
Testing a few low power mini servo motors with an Arduino and MOSFET level shifter.

Here’s a quick demo..
Notes
So-called low power / mini servos are generally designed to work from lithium battery packs in RC vehicles - so voltages in the 3.7 to 4.2V range. I have a few of these servos, and the notes that follow document some quick tests using an Arduino Uno as a driver.
2.2g Mini Digital Servo
Available from shopee.sg, aliexpress and other sources.
| Item | Specification |
|---|---|
| No-Load Velocity | 3.7V: 0.07 ± 0.01 sec/60˚ , 4.2V: 0.06 ± 0.01 sec/60˚ |
| No-load current | 3.7V: 60 ± 15mA , 4.2V: 65 ± 15mA |
| Stop Torsion | 3.7V: 95g.cm , 4.2V: 110g.cm |
| Stop Current | 3.7V: 210 ± 30mA , 4.2V: 310 ± 30mA |
| Standby Current | 3.7V: 2 ± 1mA , 4.2V: 2 ± 1mA |
| No-load life | 3.7V: >6000 times , 4.2V: >4000 times |
| Limit angle of mechanism | 180˚ ± 10˚ |
| Weight | 2.2 ± 0.2g |
| Wire Length | 110 ± 5 mm |
| Size | 20mm x 16mm x 8mm / 0.78in x0.62in x 0.31in |

In practice, the servos I got worked smoothly from ~3.5V
1.7G Mini Digital Servo
Available from shopee.sg, aliexpress and other sources.
| Item | Specification |
|---|---|
| Brand | T-power |
| Operating voltage | 2.8V-4.2V (No more than 4.2 V, or be damaged) |
| Operating speed | 0.06s/60°2.8V, 0.05s/60°3.7V |
| Torque value | 0.06Kg/2.5V, 0.075Kg/3.7V |
| Gear type | plastic |
| Connector | mini JST |
| line length | 10cm |
| Size | 20206mm |
| Weight | 1.7g |

In practice, the servo I got seemed to need at least 4V to rotate smoothly.
Construction
Since the Arduino runs at 5V, the PWM control signal is put through a MOSFET level shifter to prevent damage to the servo. NB: I suspect the servo control pin is probably 5V tolerant, but I’ve not put that theory to the test!
The servos are also separately powered from a bench power supply - I varied the voltage to test the impact on performance.

